A class for the Serial Wombat 18AB Chip that adds support for high frequency hobby Servos(200 Hz, 333Hz, 560Hz, etc) More...
#include <SerialWombatServo.h>
Public Member Functions | |
| SerialWombatHighFrequencyServo (SerialWombatChip &serialWombat) | |
| void | attach (uint8_t pin, bool reverse) |
| Do not use this interface for High Frequency Servos. | |
| void | attach (uint8_t pin, uint16_t min, uint16_t max, bool reverse=false) |
| Initialize a high Speed servo on the specified pin. | |
| int16_t | writeFrequency_Hz (uint16_t frequency_hZ) |
| int16_t | writePeriod_uS (uint16_t period_uS) |
 Public Member Functions inherited from SerialWombatServo_18AB Public Member Functions inherited from SerialWombatServo_18AB | |
| SerialWombatServo_18AB (SerialWombatChip &serialWombat) | |
| uint8_t | pin () |
| Facilitates inheritance. | |
| uint8_t | swPinModeNumber () |
| Facilitates inheritance. | |
| Public Member Functions inherited from SerialWombatServo | |
| SerialWombatServo (SerialWombatChip &sw) | |
| Constructor for the SerialWombatServo Class. | |
| void | attach (uint8_t pin, bool reverse) |
| Initialize a servo on the specified pin. | |
| void | attach (uint8_t pin, uint16_t min=544, uint16_t max=2400, bool reverse=false) |
| Initialize a servo on the specified pin. | |
| void | write (uint8_t angle) |
| Writes a value to the servo. | |
| void | write16bit (uint16_t position) |
| Writes a 16 bit value to the servo. | |
| uint8_t | read (void) |
| returns the last position of the servo scaled to a number from 0 to 180. | |
| Public Member Functions inherited from SerialWombatPin | |
| SerialWombatPin (SerialWombatChip &serialWombatChip) | |
| Instantiates a Serial Wombat Pin. | |
| SerialWombatPin (SerialWombatChip &serialWombatChip, uint8_t pin) | |
| Instantiates a Serial Wombat Pin. | |
| uint16_t | readPublicData () |
| Read the 16 Bit public data associated with this pin. | |
| void | pinMode (uint8_t mode, bool pullDown=false, bool openDrain=false) |
| Set pin to INPUT or OUTPUT, with options for pull Ups and open Drain settings. | |
| void | digitalWrite (uint8_t val) |
| Set output pin High or Low. | |
| int | digitalRead () |
| Reads the state of the Pin. | |
| uint16_t | writePublicData (uint16_t value) |
| Write a 16 bit value to this pin. | |
| uint8_t | pin () |
| Returns the current SW pin number. Used primarily for virtual calls by derived classes. | |
| uint8_t | swPinModeNumber () |
| Returns the Mode number. Used primarily by derived classes to populate packet data. | |
| int16_t | initPacketNoResponse (uint8_t packetNumber, uint8_t param0=0x55, uint8_t param1=0x55, uint8_t param2=0x55, uint8_t param3=0x55, uint8_t param4=0x55) |
| int16_t | initPacketNoResponse (uint8_t packetNumber, uint16_t param0=0x55, uint8_t param1=0x55, uint8_t param2=0x55, uint8_t param3=0x55) |
| int16_t | initPacketNoResponse (uint8_t packetNumber, uint16_t param0, uint16_t param1, uint8_t param2=0x55) |
| int16_t | disable () |
| Disables the pin mode (if applicable) | |
| int16_t | enablePullup (bool enabled) |
| Enables the weak pull up on a pin. Implemented on SW18AB and SW8B only. | |
| int16_t | enablePulldown (bool enabled) |
| Enables the weak pull down on a pin. Implemented on SW18AB and SW8B only. | |
| int16_t | enableOpenDrain (bool enabled) |
| Enables open drain mode on a pin. Implemented on SW18AB and SW8B only. | |
| int16_t | forceDMA (bool enabled) |
| Forces use of DMA instead of hardware timing resources on SW18AB. | |
| void | setPinNumberForTesting (uint8_t pin) |
| A function designed for testing only. May have unpredictable results if used in real time. Not intended for general use. | |
| Public Member Functions inherited from SerialWombatAbstractScaledOutput | |
| SerialWombatAbstractScaledOutput (SerialWombatChip &sw) | |
| Constructor for the SerialWombatAbstractScaledOutput Class. | |
| int16_t | writeTimeout (uint16_t timeout_mS, uint16_t timeoutOutputValue) |
| Enable a timeout value which will cause the output to go to a default value if not updated. | |
| int16_t | writeScalingEnabled (bool enabled, uint8_t sourcePin) |
| Enable scaling and set which pin or public data is used as the input source. | |
| int16_t | writeInputScaling (uint16_t inputMin, uint16_t inputMax) |
| Scale incoming values to a range of 0 to 65535. | |
| int16_t | writeOutputScaling (uint16_t outputMin, uint16_t outputMax) |
| Reduces the output range from 0 to 65535 to user specified range. | |
| int16_t | writeScalingInvertedInput (bool inverted) |
| if enabled subtract the input value from 65535 before doing any other processing. | |
| int16_t | writeScalingTargetValue (uint16_t target) |
| The target input value for PID control. | |
| int16_t | writeRateControl (Period samplePeriod, uint16_t maximumChangecounts, uint16_t maximumDecrementCounts=0) |
| Controls how fast an ouput can change in counts. | |
| int16_t | write1stOrderFiltering (Period samplePeriod, uint16_t filterConstant) |
| Controls how fast an ouput can change based on filtering. | |
| int16_t | writeHysteresis (uint16_t lowLimit, uint16_t lowOutputValue, uint16_t highLimit, uint16_t highOutputValue, uint16_t initialOutputValue) |
| Controls the output based on hystersis control. | |
| int16_t | writeRamp (uint16_t slowIncrement, uint16_t incrementThreshold, uint16_t fastIncrement, Period samplePeriod, RampMode rampMode) |
| Configure the scaled output block into Ramp control mode. | |
| int16_t | writePID (uint16_t kp, uint16_t ki, uint16_t kd, uint16_t target, Period samplePeriod, uint8_t targetPin=255, bool biDirectional=false) |
| Configure the scaled output block into PID control mode. | |
| uint16_t | readLastOutputValue () |
| Request Last Output Value. | |
| int16_t | writeScalingTargetValueResetIntegrator (uint16_t target) |
| int32_t | PIDGetLastError () |
| int32_t | PIDGetLastIntegrator () |
| int32_t | PIDGetLastIntegratorEffort () |
| int32_t | PIDGetLastProportionalEffort () |
| int32_t | PIDGetLastDerivativeEffort () |
| int32_t | PIDGetLastEffort () |
| uint16_t | ReadLastTarget () |
| int16_t | Enable2DLookupOutputScaling (uint16_t IndexInUserMemory) |
| Set Up 2D Lookup Output Scaling. | |
Additional Inherited Members | |
| Public Types inherited from SerialWombatAbstractScaledOutput | |
| enum | Period { PERIOD_1mS = 0 , PERIOD_2mS = 1 , PERIOD_4mS = 2 , PERIOD_8mS = 3 , PERIOD_16mS = 4 , PERIOD_32mS = 5 , PERIOD_64mS = 6 , PERIOD_128mS = 7 , PERIOD_256mS = 8 , PERIOD_512mS = 9 , PERIOD_1024mS = 10 } |
| enum | RampMode { RAMP_MODE_BOTH = 0 , RAMP_MODE_INCREMENT = 1 , RAMP_MODE_DECREMENT = 2 } |
| Protected Member Functions inherited from SerialWombatServo | |
| void | initializeServo () |
| Protected Attributes inherited from SerialWombatServo | |
| uint16_t | _position = 0 |
| uint16_t | _min = 544 |
| uint16_t | _max = 2400 |
| bool | _reverse = false |
| Protected Attributes inherited from SerialWombatPin | |
| uint8_t | _pin = 255 |
| SerialWombatChip & | _sw |
| uint8_t | _pinMode = 0 |
Detailed Description
A class for the Serial Wombat 18AB Chip that adds support for high frequency hobby Servos(200 Hz, 333Hz, 560Hz, etc)
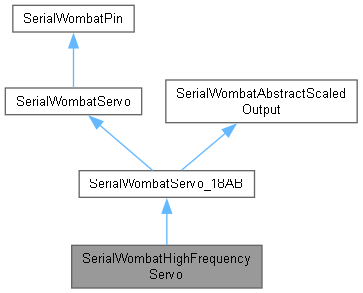
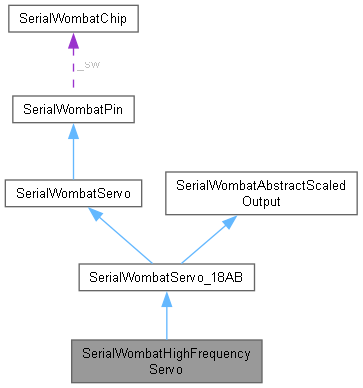
The SerialWombatHighFrequencyServo class is used to control hobby high frequency servos attached to the Serial Wombat chip.
This class SerialWombatServo_18AB SerialWombatServo by adding support for a frequency/period setting and by changing the on-chip pin mode to one optimized for high speed servos.
Only Enhanced Digital Capability output pins (0-4,7,9-19) pins can be used for this pin mode.
Up to six High Frequency Servo pins may be assigned per Serial Wombat 18AB Chip. This pin mode claims and holds one of the 6 timing resources also used by PWM output, standard servo output, etc.
This mode creates rapid pulse outputs by using a PWM rather than pulse generation mode. This makes it well suited for fast updates, (200 Hz or better) but a poor choice for driving standard 50Hz servos as it will have worse resolution at low speeds than the standard mode.
The SerialWombatServo and SerialWombatServo_18AB interface void attach(uint8_t pin, bool reverse) is not available in this mode, as it must be explicitly configured for minimum and maximum pulse width.
The pulse update rate can be set with writeFrequency() or writePeriod().
This class uses "attach" rather than "begin" to initialize servos to be consistent with the Arduino Servo native API.
Definition at line 253 of file SerialWombatServo.h.
Constructor & Destructor Documentation
◆ SerialWombatHighFrequencyServo()
|
inline |
Definition at line 257 of file SerialWombatServo.h.
Member Function Documentation
◆ attach() [1/2]
| void SerialWombatHighFrequencyServo::attach | ( | uint8_t | pin, |
| bool | reverse ) |
Do not use this interface for High Frequency Servos.
- Parameters
-
pin The Serial Wombat pin to set. Do not use this interface. Use the one below. reverse Do not use this interface. Use the one below.
◆ attach() [2/2]
|
inline |
Initialize a high Speed servo on the specified pin.
This function must be called after the SerialWombatChip instance specified in the constructor has been initialized with a begin call. This function must be followed by a call to writeFrequency() or writePeriod()
- Parameters
-
pin The Serial Wombat pin to set. The Serial Wombat pin to set. This must be an enhanced capability pin ( WP0-4, WP7, or WP9-19) min Minimum pulse width in uS.
max Maximum pulse width in uS. Needs to be less than the value specified after in writePeriod / write Frequency reverse If true, the pulse widths will be reversed, with the longest pulse width corresponding to 0 position.
Definition at line 279 of file SerialWombatServo.h.
◆ writeFrequency_Hz()
|
inline |
Definition at line 289 of file SerialWombatServo.h.
◆ writePeriod_uS()
|
inline |
Definition at line 293 of file SerialWombatServo.h.
Generated by