A class representing an Allegro ACS712 5A current sensor connected to a SW8B Analog input on a PCB0031 Grip board. More...
#include <PCB0031_Grip.h>
Public Member Functions | |
| GripACS712 (SerialWombatChip &serialWombatChip) | |
| Constructor for the GripACS712 Class. | |
| int16_t | begin (uint8_t pin) |
| Initialize a GripACS712 on the specified pin. | |
| uint16_t | calibrateIdleCurrent () |
| called to set the zero calibration current | |
| int16_t | readCurrent_mA () |
| returns the current reading in Milliamps. May be negative | |
 Public Member Functions inherited from SerialWombatAnalogInput_18AB Public Member Functions inherited from SerialWombatAnalogInput_18AB | |
| SerialWombatAnalogInput_18AB (SerialWombatChip &serialWombat) | |
| uint8_t | pin () |
| Used for inheritance. | |
| uint8_t | swPinModeNumber () |
| Used for ineheritance. | |
| Public Member Functions inherited from SerialWombatAnalogInput | |
| SerialWombatAnalogInput (SerialWombatChip &SerialWombatChip) | |
| Constructor for the SerialWombatAnalogInput class. | |
| int16_t | begin (uint8_t pin, uint16_t averageSamples=64, uint16_t filterConstant=0xFF80, AnalogInputPublicDataOutput publicDataOutput=AnalogInputPublicDataOutput::AnalogInputPublicDataOutput_Raw) |
| Initialize an analog input on a given pin. | |
| uint16_t | readVoltage_mV () |
| Retreive a raw A/D measurement and convert it to mV. | |
| uint16_t | readCounts () |
| Retreive a raw A/D measurement. | |
| uint16_t | readFiltered_mV () |
| Retreive a filtered A/D measurement and convert it to mV. | |
| uint16_t | readFilteredCounts () |
| Retreive a filtered A/D measurement. | |
| uint16_t | readAveraged_mV () |
| Retreive an averaged A/D measurement and convert it to mV. | |
| uint16_t | readAveragedCounts () |
| Retreive an averaged A/D measurement. | |
| uint16_t | updateSupplyVoltage_mV () |
| Provides a wrapper around the readSupplyVoltage_mV() method for the SerialWombat chip hosting this pin mode. | |
| uint16_t | readMaximum_mV (bool resetAfterRead=false) |
| Retreive the maximum single sample A/D value in mV. | |
| uint16_t | readMaximumCounts (bool resetAfterRead=false) |
| uint16_t | readMinimum_mV (bool resetAfterRead=false) |
| uint16_t | readMinimumCounts (bool resetAfterRead=false) |
| Retreive the maximum single sample A/D value in counts. | |
| Public Member Functions inherited from SerialWombatPin | |
| SerialWombatPin (SerialWombatChip &serialWombatChip) | |
| Instantiates a Serial Wombat Pin. | |
| SerialWombatPin (SerialWombatChip &serialWombatChip, uint8_t pin) | |
| Instantiates a Serial Wombat Pin. | |
| uint16_t | readPublicData () |
| Read the 16 Bit public data associated with this pin. | |
| void | pinMode (uint8_t mode, bool pullDown=false, bool openDrain=false) |
| Set pin to INPUT or OUTPUT, with options for pull Ups and open Drain settings. | |
| void | digitalWrite (uint8_t val) |
| Set output pin High or Low. | |
| int | digitalRead () |
| Reads the state of the Pin. | |
| uint16_t | writePublicData (uint16_t value) |
| Write a 16 bit value to this pin. | |
| uint8_t | pin () |
| Returns the current SW pin number. Used primarily for virtual calls by derived classes. | |
| uint8_t | swPinModeNumber () |
| Returns the Mode number. Used primarily by derived classes to populate packet data. | |
| int16_t | initPacketNoResponse (uint8_t packetNumber, uint8_t param0=0x55, uint8_t param1=0x55, uint8_t param2=0x55, uint8_t param3=0x55, uint8_t param4=0x55) |
| int16_t | initPacketNoResponse (uint8_t packetNumber, uint16_t param0=0x55, uint8_t param1=0x55, uint8_t param2=0x55, uint8_t param3=0x55) |
| int16_t | initPacketNoResponse (uint8_t packetNumber, uint16_t param0, uint16_t param1, uint8_t param2=0x55) |
| int16_t | disable () |
| Disables the pin mode (if applicable) | |
| int16_t | enablePullup (bool enabled) |
| Enables the weak pull up on a pin. Implemented on SW18AB and SW8B only. | |
| int16_t | enablePulldown (bool enabled) |
| Enables the weak pull down on a pin. Implemented on SW18AB and SW8B only. | |
| int16_t | enableOpenDrain (bool enabled) |
| Enables open drain mode on a pin. Implemented on SW18AB and SW8B only. | |
| int16_t | forceDMA (bool enabled) |
| Forces use of DMA instead of hardware timing resources on SW18AB. | |
| void | setPinNumberForTesting (uint8_t pin) |
| A function designed for testing only. May have unpredictable results if used in real time. Not intended for general use. | |
| Public Member Functions inherited from SerialWombatAbstractProcessedInput | |
| SerialWombatAbstractProcessedInput (SerialWombatChip &sw) | |
| Constructor for the SerialWombatAbstractScaledOutput Class. | |
| int16_t | writeInverted (bool inverted) |
| if enabled subtract the input value from 65535 before doing any other processing. | |
| int16_t | writeFirstOrderFilteringConstant (uint16_t constant) |
| Set a first order filtering constant to be applied to the signal Higher is heavier filtering. | |
| int16_t | writeAveragingNumberOfSamples (uint16_t numberOfSamples) |
| Set a number of samples to average for each update of the downstream signal. | |
| int16_t | writeExcludeBelowAbove (uint16_t low, uint16_t high) |
| Sets input value ranges which are discarded rather than processed. | |
| int16_t | configureQueue (SerialWombatQueue *queue, Period period, bool queueHighByte=true, bool queueLowByte=true) |
| Sets up the queueing feature for this pin mode. Queue must have been initialized prior to this queue. | |
| int16_t | configureOutputValue (OutputValue outputValue) |
| Configures whether the pin's public data value is averaged, filtered, or neither. | |
| int16_t | writeTransformScaleRange (uint16_t min, uint16_t max) |
| Scale incoming values to a range of 0 to 65535. | |
| int16_t | writeTransformLinearMXB (int32_t m, int32_t b) |
| Scale incoming values based on an mx+b linear equation. | |
| int16_t | configureIntegrator (uint16_t negativeMaxIndex, uint16_t negativeMidIndex, uint16_t negativeDeadZone, uint16_t positiveDeadZone, uint16_t positiveMidIndex, uint16_t positiveMaxIndex, uint16_t midIncrement, uint16_t maxIncrement, uint16_t initialValue, uint8_t updateFrequencyMask=0) |
| Sort incoming data into one of 5 ranges, and integrate based on linear interpolation in those ranges. | |
| int16_t | writeProcessedInputEnable (bool enabled) |
| Enables or disables all input processing functions If disabled, the raw input value is placed directly in the pin's 16 bit public data buffer. | |
| uint16_t | readMinimum (bool resetAfterRead=false) |
| Retreive the maximum public data output value since the last call with reset= true. | |
| uint16_t | readMaximum (bool resetAfterRead=false) |
| Retreive the minimum public data output value since the last call with reset= true. | |
| uint16_t | readAverage () |
| Retreive the last completed averaged value. | |
| uint16_t | readFiltered () |
| Retreive the filtered value. | |
Public Attributes | |
| uint16_t | zeroCurrentCalibration = 32768 |
| Variable holding the zero calibration value in counts. | |
Additional Inherited Members | |
| Public Types inherited from SerialWombatAbstractProcessedInput | |
| enum | Period { PERIOD_1mS = 0 , PERIOD_2mS = 1 , PERIOD_4mS = 2 , PERIOD_8mS = 3 , PERIOD_16mS = 4 , PERIOD_32mS = 5 , PERIOD_64mS = 6 , PERIOD_128mS = 7 , PERIOD_256mS = 8 , PERIOD_512mS = 9 , PERIOD_1024mS = 10 } |
| enum | OutputValue { RAW = 0 , FIRST_ORDER_FILTERED = 1 , AVERAGE = 2 } |
| enum | Transform { NONE = 0 , SCALE_RANGE = 1 , LINEAR_MXB = 2 } |
| Protected Attributes inherited from SerialWombatPin | |
| uint8_t | _pin = 255 |
| SerialWombatChip & | _sw |
| uint8_t | _pinMode = 0 |
Detailed Description
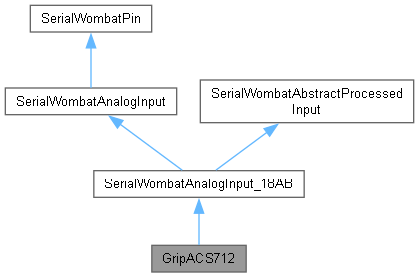
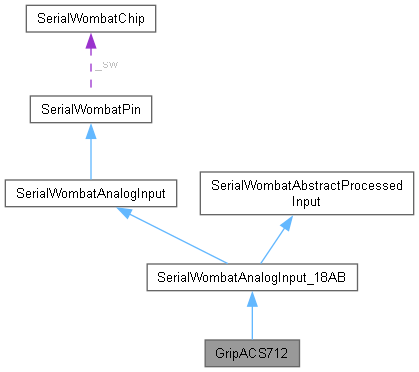
A class representing an Allegro ACS712 5A current sensor connected to a SW8B Analog input on a PCB0031 Grip board.
The GripACS712 class is a child class of SerialWombatAnalogInput_18AB. It has all of the same methods and adds methods for converting the output to mA, and setting a reference zero current. This can be either real zero current, or an offset such as in the case of a Servo which pulls a small current to drive its electronics even when the motor is not generating torque.
A Tutorial video is also avaialble:
Definition at line 51 of file PCB0031_Grip.h.
Constructor & Destructor Documentation
◆ GripACS712()
|
inline |
Constructor for the GripACS712 Class.
- Parameters
-
serialWombatChip A reference to a previously declared SerialWombatChip to which the Servo is connected.
Definition at line 59 of file PCB0031_Grip.h.
Member Function Documentation
◆ begin()
|
inline |
Initialize a GripACS712 on the specified pin.
This function must be called after the SerialWombatChip instance specified in the constructor has been initialized with a begin call.
This function initializes the underlying analog input with default parameters.
- Parameters
-
pin The Serial Wombat pin to set. Valid values are 4-7 as those pins are ACS712 pins on the grip board
- Returns
- Returns a negative number indicating an error code, or a non negative number indicating success
Definition at line 72 of file PCB0031_Grip.h.
◆ calibrateIdleCurrent()
|
inline |
called to set the zero calibration current
- Returns
- returns the value in counts of the calibration
Definition at line 91 of file PCB0031_Grip.h.
◆ readCurrent_mA()
|
inline |
returns the current reading in Milliamps. May be negative
- Returns
- returns the current value in mA
Definition at line 103 of file PCB0031_Grip.h.
Member Data Documentation
◆ zeroCurrentCalibration
| uint16_t GripACS712::zeroCurrentCalibration = 32768 |
Variable holding the zero calibration value in counts.
Definition at line 84 of file PCB0031_Grip.h.
Generated by